
力学实验测量系统服务商
采用24位AD转换,通过数字化多达64个压力通道的快速同步采样,用于测量表面压力
采用多孔(4-7孔)压力探头,用来测量流场三维动态风速,分析雷诺应力与湍流强度
森荃科技
采用非接触式光学测量技术,全场测量,用于研究和诊断流体流动过程,使其可视化和可测量化。
提供太赫兹椭圆仪
材料亲水/疏水性能分析
非破坏性0.5-50纳米孔径分析
采用数字图像相关技术,可测量任意材料全场位移、应变、模态等参数,有限元分析。
实验力学测量系统方案服务商
Experimental Mechanics Measurement System Solution Service Provider

激光多普勒测速仪( LDV )

激光多普勒测速仪( LDV )
激光多普勒测速仪(LDV )是一种能够对液体、气体等流场各点的速度进行非接触、时间分辨率测量的系统。激光内置在发光系统中,不需要光轴调整,也不需要速度校准。最适合风洞试验、水槽试验、旋转体周边气流分析等。

西華数码映像LDV的特点
◆流动场所的非接触测量
◆点测量
◆不需光轴调整(DPSS激光内置型)
◆高速时序数据获取解析
◆1探头后方散射系统、发光系统+受光系统、小型探头系统等丰富的阵容
用途
◆海洋规模和模型规模(船舶性能测定)
◆诊断流动质量
◆风洞,水,油路
◆风洞空气动力学实验车飞机周围的流动
◆装置内的流动(冷却效果)
◆回流水槽、造波装 置的水流
◆可视化弓|擎内的流动
◆冷却装置内的流动
◆墙壁剪切力测量(microPro)
◆空气阻力的减少
◆乱流混合
◆边界层
LDV系统阵容

◆1D-LDV
1D-LDV系统是具有发光系统+光接收系统的一个探头的反向散射系统。是一不需其他组件就可以有效的对流速进行测量的独立系统。探头中包括激光,小型光束整形光学器件,接收光学 器件和检测系统。传感器的直径为1.25英寸(32mm) ,长6.5英寸(165mm)。传感器和探针之间的距离(开关断开距离可以从1.30、1.97、 3.94、 5.91或9.45中选择。
◆规格
可测量速度范围 | -50的600m/sec |
测量精度 | 99.7%以上 |
激光输出 | 140mW |
波长 | 658nm,405nm (波长可选) |
测量体积(XxYxZ) | 30x60x200μm 100x 200 x 1200um(取决于工作距离) |
激光等级 | IIIb |
工作环境 | 0~55°C |

◆2D-LDV
2D-LDV (激光多普勒测速仪)是一种能够对液体、气体等流场各点速度进行非接触、高时间分辨率测量的系统。有两个独立的探头,在共同的外壳内部相互垂直排列,两个组件有共同的光路。测量距离为33mm , 50mm,100mm , 150mm或240mm。它由2d-ldv探头、双处理器、解析软件组成。附加组件上,可以提供手动或电动一轴或两轴的移动机和专用的计算机。因为接收器通过光纤连接到传感器,所以电子设备就可以放置在离探头几米远的地方。在同一个探头内部的发光系统内置有二维波长的各激光,不需光轴调整,也不需要速度校准。
◆规格
可测量速度范围 | -50~ 600m/sec |
测量精度 | 99.7%以上 |
激光输出 | 130mWx 2 |
波长 | 658nm,785nm (波长可选) |
测量体积(XxYxZ) | 30x60x200μm 100 x 200 x 1200μm(取决于工作距离) |
激光等级 | IIIb |
工作环境 | 0~55°C |

◆3D-LDV
3D-LDV由设置在专用设计治具上的3个LDV探头和具备USB的3个处理器、以及3个系统同步进行3D运算处理的软件构成。因为是由3个完全独立的系统构成的模块设计,所以能灵活对应各种各样的用途,每1个维度单独使用1D-LDV探头的方式,或使用2D-LDV探头和1LDV探头的组合,可以根据使用环境选择。
◆规格
可测量速度范围 | --50~600m/sec |
测量精度 | 99.7%以上 |
激光输出 | 1 0mWx 3 |
波长 | 658nm,785nm,830nm (波长可选) |
激光等级 | IIIb |
工作环境 | 0~55°C |

◆microPro (墙面附近测量用激光多普勒测速仪)
microPro剪切应力传感器能够在使用1D-miniLDV遍历的同时,测量墙面附近的切变。它被设计成在对数域中的多个点处自动获得层流或湍流边界层的线性区域内的平均速度。次,利用速度数据获得墙面速度梯度的最佳估计,通过了解粘性系数,计算墙壁剪切应力。剪切应力传感器因为在探头中包含着miniLDV ,微型遍历台和受光光学系统,不需要用户的调整和校对。可以为客户提供符合流体设备的治具制作。该图像是圆形管道附件的示例。处理软件自动检测窗口的位置,收集墙的边界层的平均速度分布,并使用Spalding , Musker曲线或选定的轮廓拟合数据,如下所示计算壁面剪切力。
◆特点
包括空气和水在内的任何透明介质均可使用。
.独立式
无需调整
校准在I厂进行,户不需要校准
可选:电池供电
.可选:防水/耐温外壳
◆规格:
剪切应力的测定范围 | 0.7 ~ 6500Pa (水) 0.015~ 140Pa (氢) 可指定其他范围 |
反复精度 | 97%以上 |
测定精度 | 99.7%以上 |
测量体积(XxYxZ) | 15x 30x 80μm |
焦距 | 15mm |
激光输出 | 110mW |
激光波长 | 658nm |
激光等级 | IIIb |
操作环境 | 5~35 |
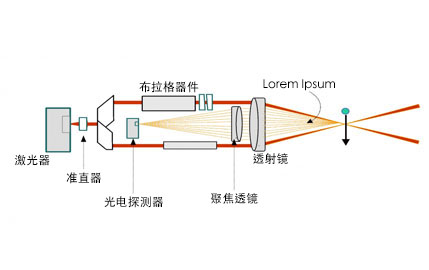
激光多普勒型测速仪的测量原理
LDV不是测定流体要素的速度本身,而是测量混入流体中的微粒子的速度。如果是微粒非常小并且遵循流体要素运动,就等于测星流体的速度。LDV通过将激光照射到流体中,从微粒子产生的散射光通过受光部(光学多线管)接受并解析,得到微粒子的速度。
多维测量也是LDV的一一个特征
因为LDV仅仅测量平行于光束相交并且垂直于光轴的速度成分,所以如果同时测量3个方向的速度成分,就可以知道种子粒子矢量的大小和方向。
我们选择了将不同波长的激光引入其交叉面,使其交叉面分别成90° ,并将同一焦点相结合的方法。
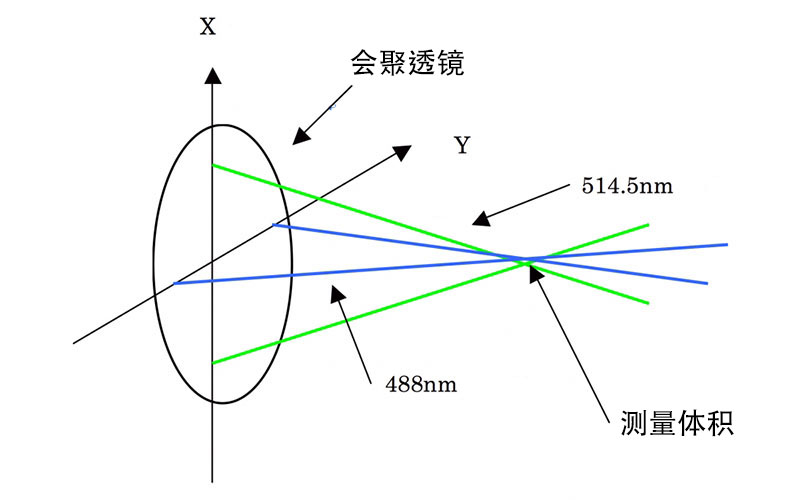
在三次元测量中,使用AR-离子激光器作为光源,将2次元测量时使用的高强度514.5nm (緣色)和488.0nm (色)的光用二向色分光镜或棱镜分离为476.5nm (紫色)光作为入射光束使用。
因为散射光中包含了所有这些波长,所以受光系统准备了光学多元数目的光学传感器,通过干扰滤光器充分分离散射光后,将每个波长都导入到光学多元件中。
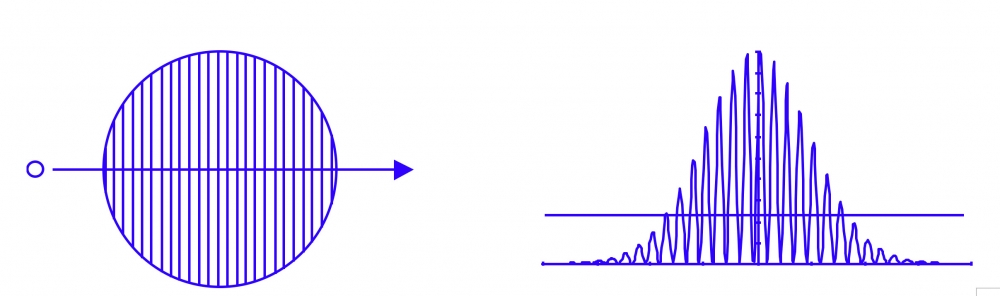
当两个激光束被挤压和交叉时,在该点产生规则的明暗对比的条纹图案。这被称为干涉条纹( Fringe ) , 并且该恒定条纹间隔通过常数公式计算。当混合在流体中的细颗粒通过这两个激光束的交叉点时,干涉条纹产生了清晰的对比。该对比度被受光部(光电倍增管)感知,转换为电压后,从原本具有激光光的高斯特性(激光自身的功率特性,中心部变强)转变为峰值。被称为多普勒脉冲串信号。
通过对该多普勒脉冲串信号的山峰部分进行计数来获得速度计算。当速度慢时,它变成宽(低频)的山状间隔,相反,当它快时它变成窄的山间距(高频)。由于干涉条纹的间隔是恒定的,当细颗粒通过时,产生具有频率特性的常规信号,并且从该频率通过以下等式表示速度。
V:粒子(流体)速度(m/sec)
σ :干扰条纹间隔(um)
f:多普勒信号频率(MHz)
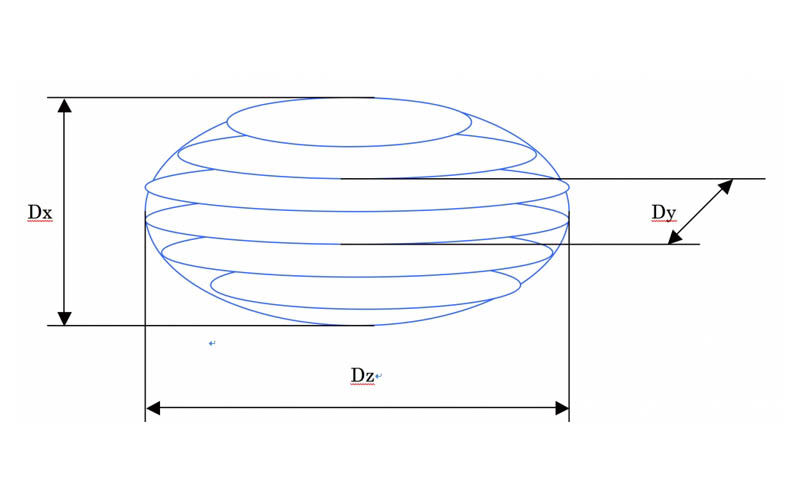
激光束的交点是测量的体积,但因为光束的粗度而变成旋转椭圆体。测量通过该区域(测量体积)的粒子速度,测量体积的尺寸决定LDV的空间分辨率。聚焦透镜焦点位置处的光束直径Df用下式
示。
Df =4FM/πD1
F :聚焦透镜焦距
λ :激光波长
D1 :入射光束直径
假设对于球体的测量体积的每个维度,光束交叉角为2θ
Dx= Df /cosθ
Dy= Df
Dz = Df /sinθ
通过缩短焦距F或增加入射光束直径D1可以减小测量体积。降低测量体积对于提高LDV的空间分辨率非常重要。如果不可能使测量对象和光学系统非常接近,则使用光束扩展器等来增加两个光束之间的距离和入射光束的直径。
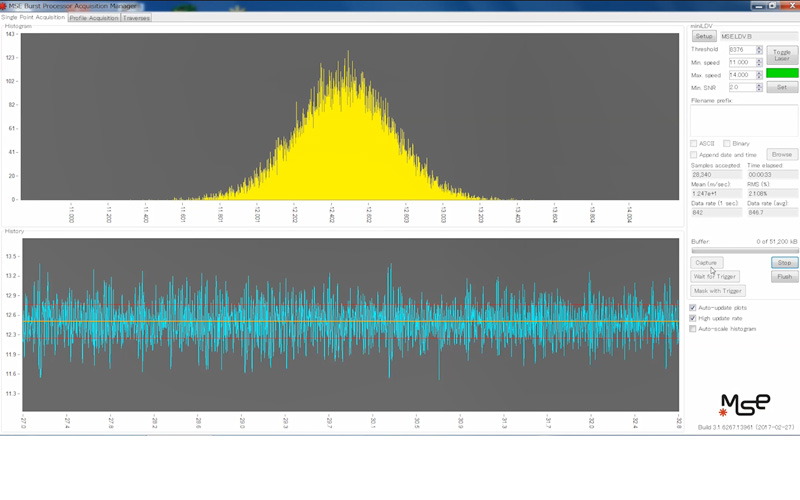
LDV信号处理和数据处理
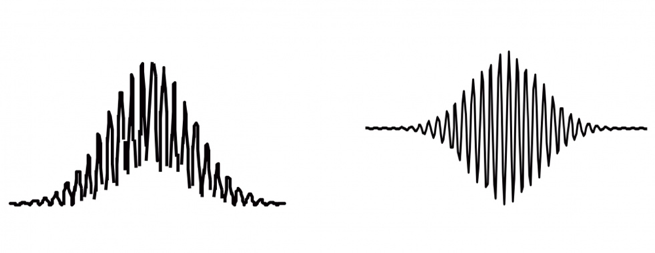
图是对于通过测量体积的来自单一粒子的散射光 ,光电倍增管的输出信号的普勒脉冲串信号。
其中,多普勒频率是具有大幅度的高频分量的频率(包括较高频率的噪声)。低频幅度,即基座低频分量,基 于测量体积的横截面光强度分布的高斯分布。每当测量体积内通过一个粒子时 ,就会观察到普勒脉冲串信号。一个脉冲串信号 中包含的多普勒频率的波数取决于测量体积内存在几个边缘、粒子经过测量体积内的哪个位置。
测量体积中的最大干涉条纹数N由以下等式表示。
N= Dx/σ= 4D/ ( πD1 )
D :入射光束间距
D1 :入射光束直径、
通过电滤波器去除由于噪声|起的基座低频分量和高频分量。
当通过滤波器之后的波形变为如图所示并且仅剩余多普勒频率的波时,执行频率分析以找到f。该信号称为多 普勒信号。
关于信号处理器的种类,与以往的追踪式、计数式相比,最近以FFT式、相关式为主流。
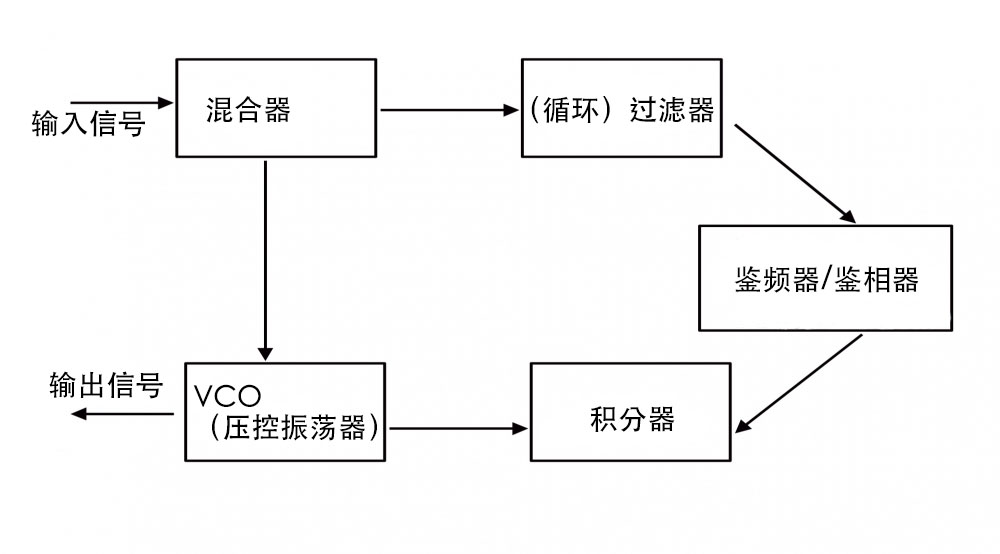
(1)追踪式
.使用F(频率)-V(电压)转换器。
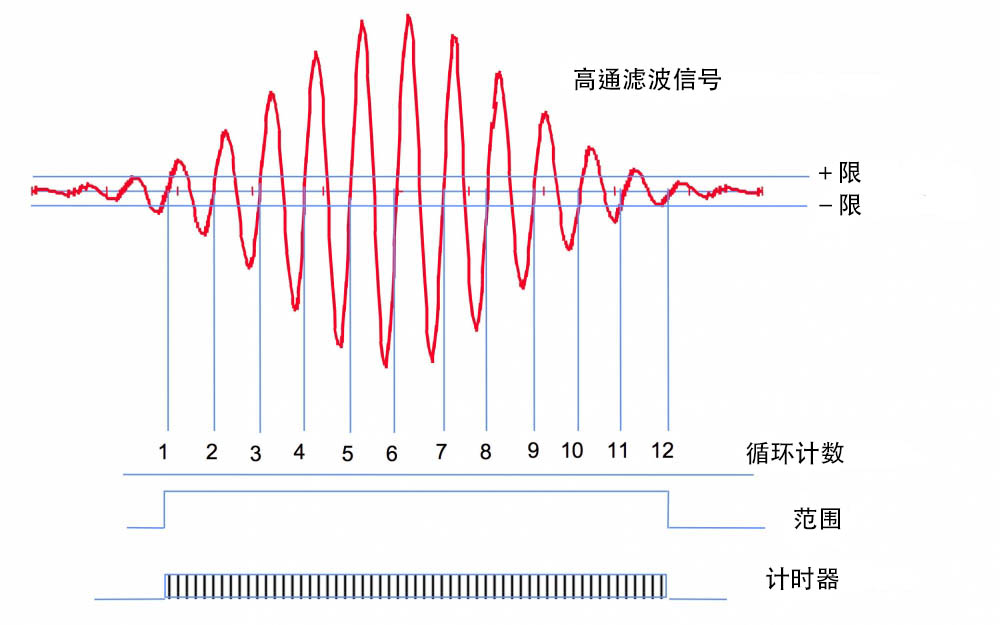
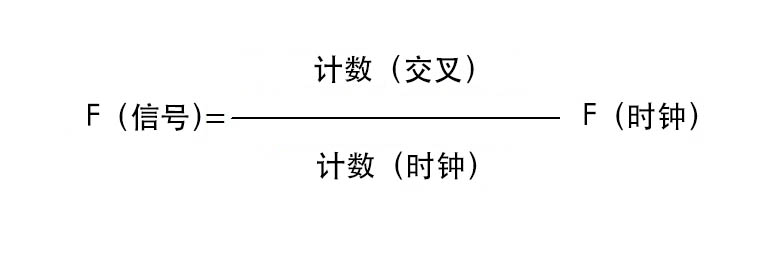
(2)计数式
.在将多普勒信号的波形整形为矩形型之后,由内置的具有高频率的时钟脉冲来测量周期以确定频率。
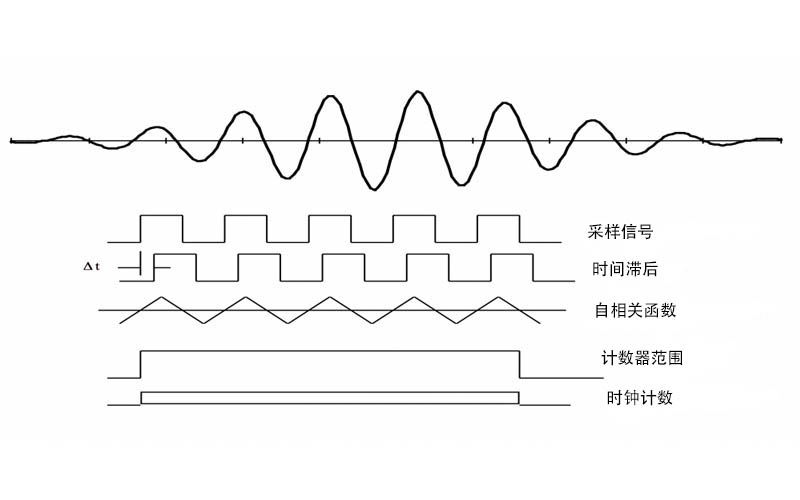
(3)相关式
获得多普勒信号的自相关系数,并从该周期获得多普勒频率。
(4)FFT
多普勒信号被高速变换为A/D并执行FFT运算,所述频谱的峰值频率被设置为多普勒频率
Fluid measurement
Copyright © 2023,All rights reserved版权所有 © 大连森荃科技有限公司 辽ICP备2023009652号 未经许可 严禁复制 建议使用1366X768分辨率浏览本站